目次
概略
| 順番 | 基準局とする電子基準点 | 解析を行う点 |
| 1回目の解析 | 電子基準点 A | 新点 1 |
| 2回目の解析 | 新点 1 | 新点 2 |
| 3回目の解析 | 電子基準点 B | 新点 2 |
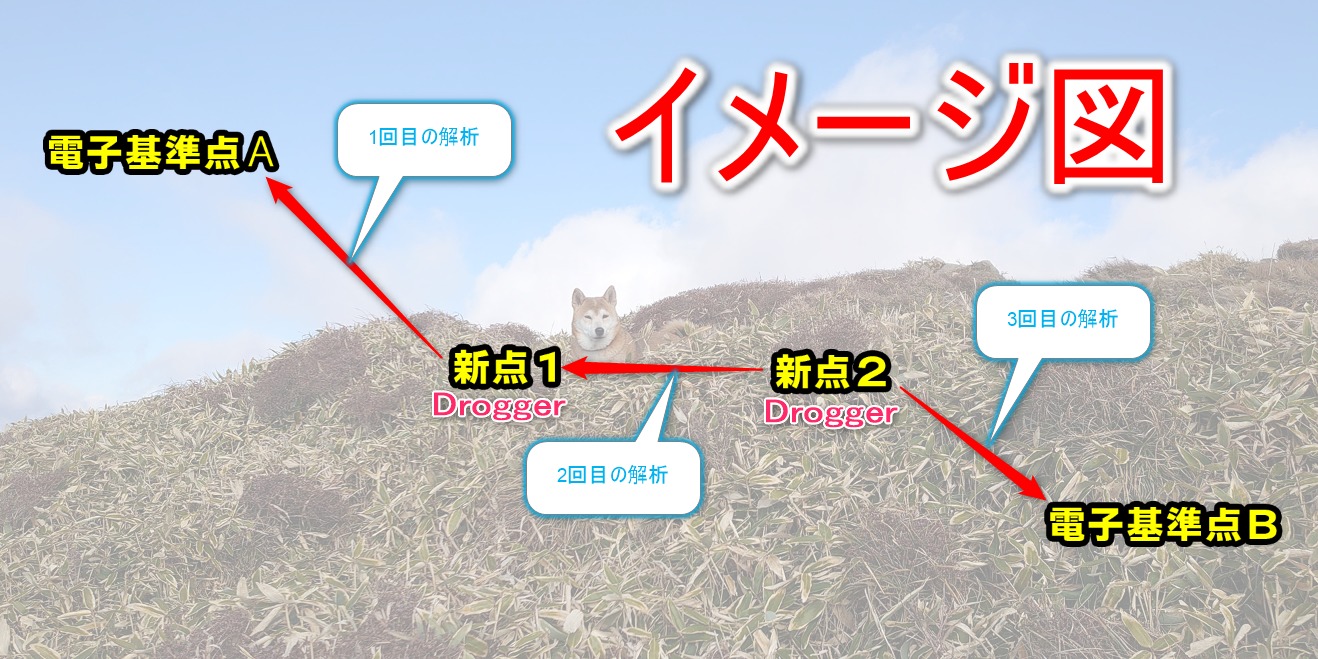
新点はDrogger3台以上の同時観測で増やす事も出来ます。

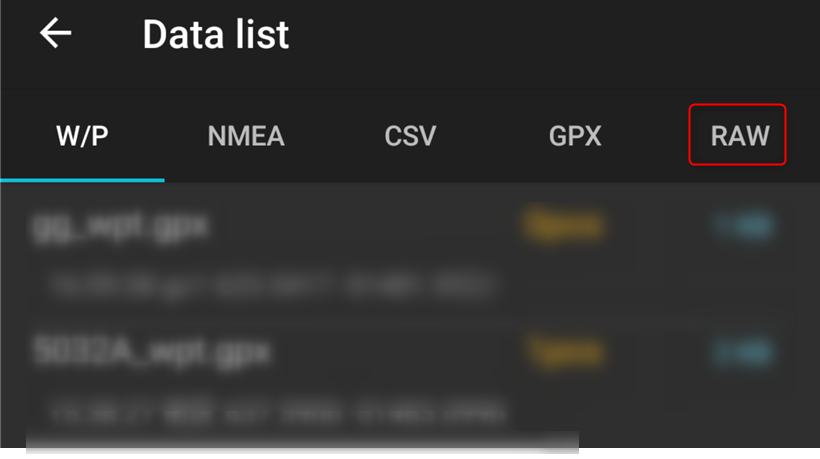
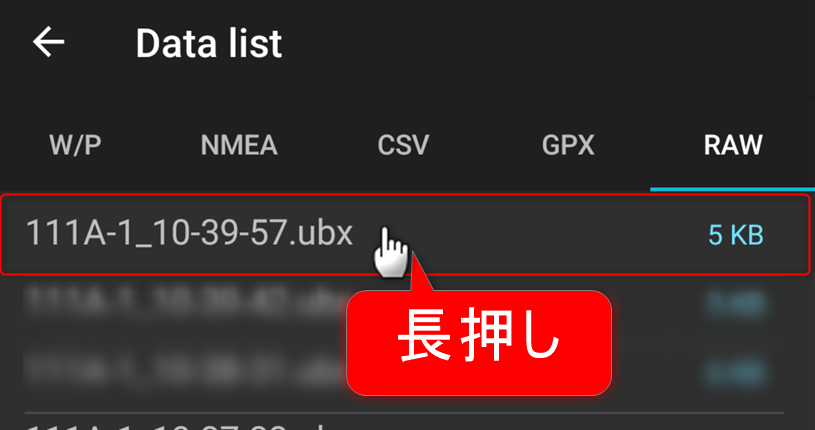
RAWデータをPCに転送

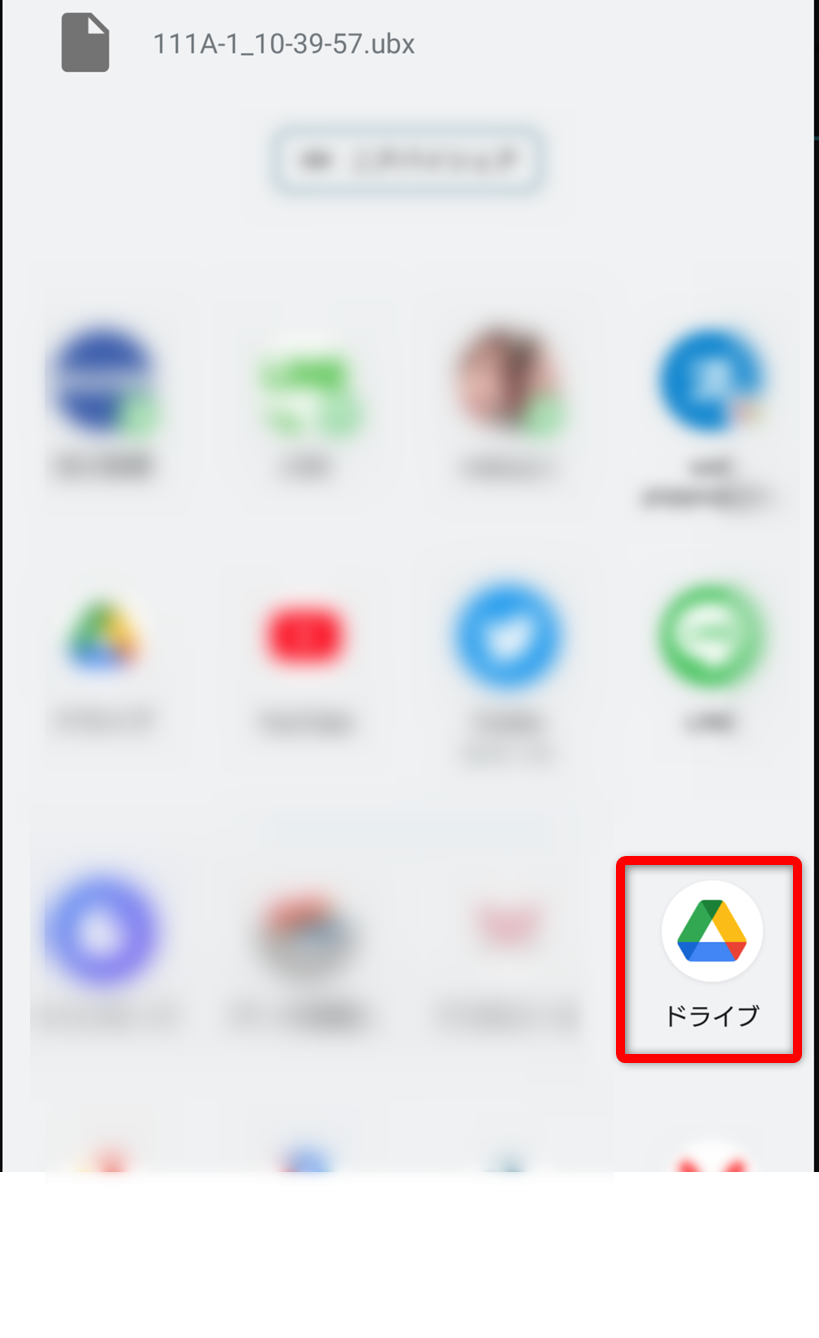
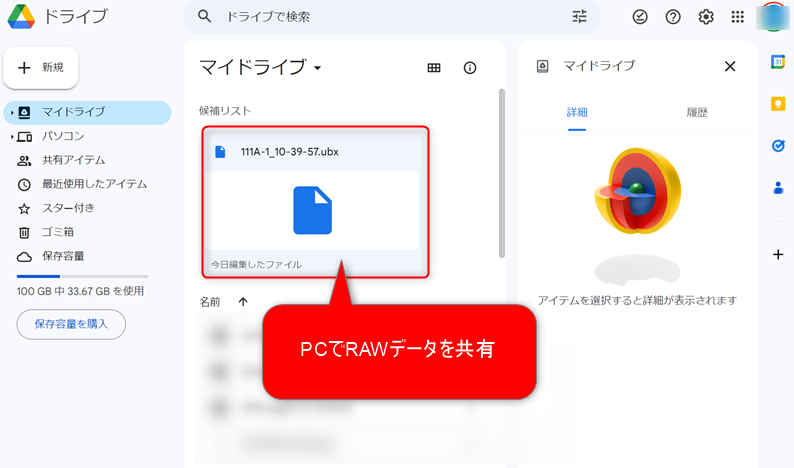
Google ドライブ でPCと共有

PCで、Google ドライブを開き、ダウンロードする。
メールでPCと共有
事務所のメールアドレスに送って、PCに保存します。送るファイルサイズよっては不可かも。
Drogger Processorで解析を行う
※初期設定は終わっているものとします。
→Drogger Processorの初期設定についてはこちら
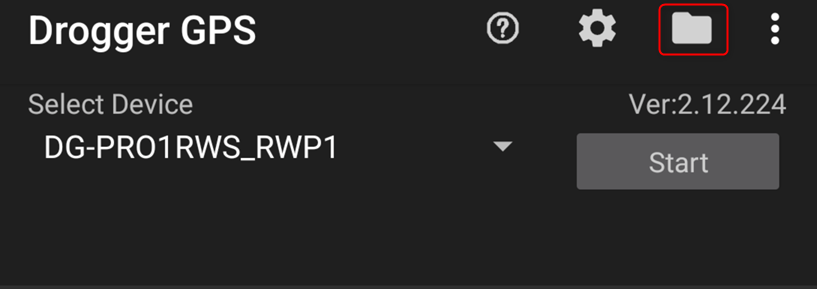
Drogger Processorを起動する
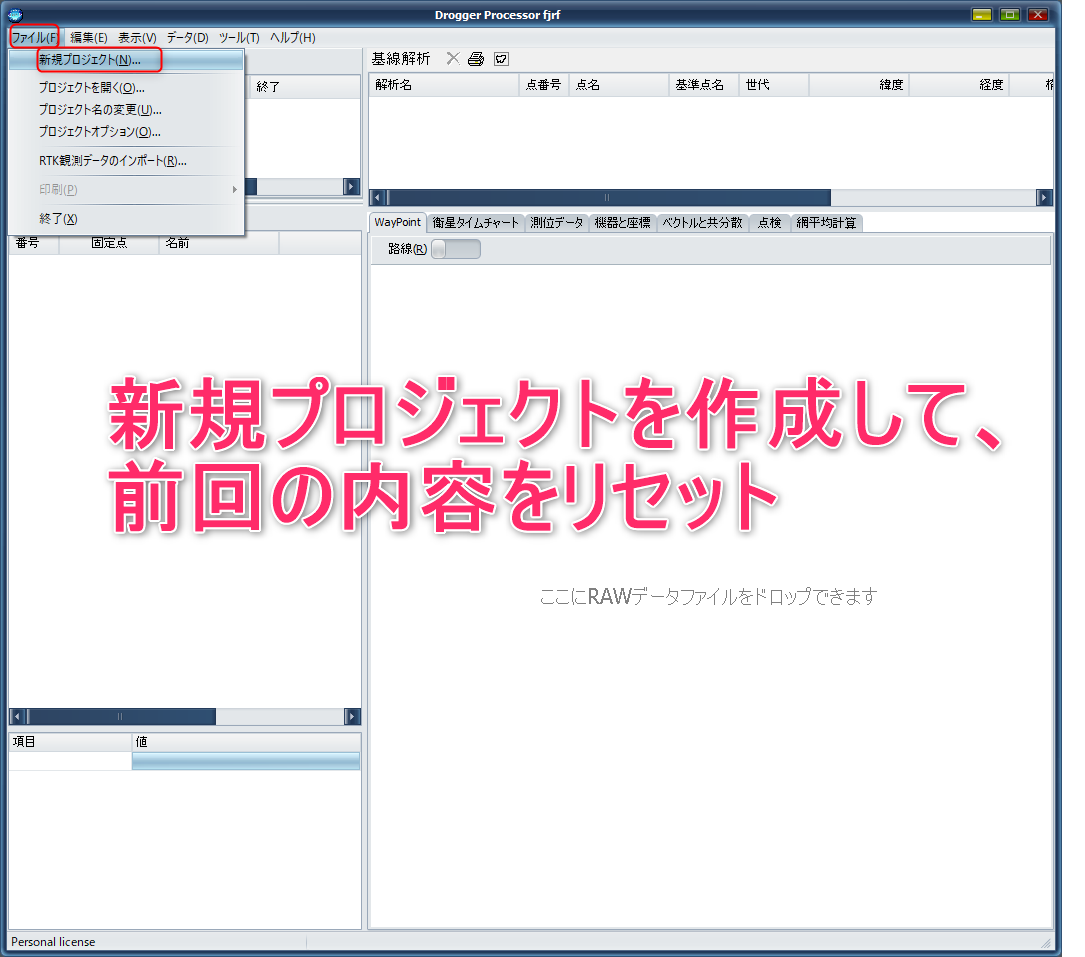
新規プロジェクトを立ち上げる

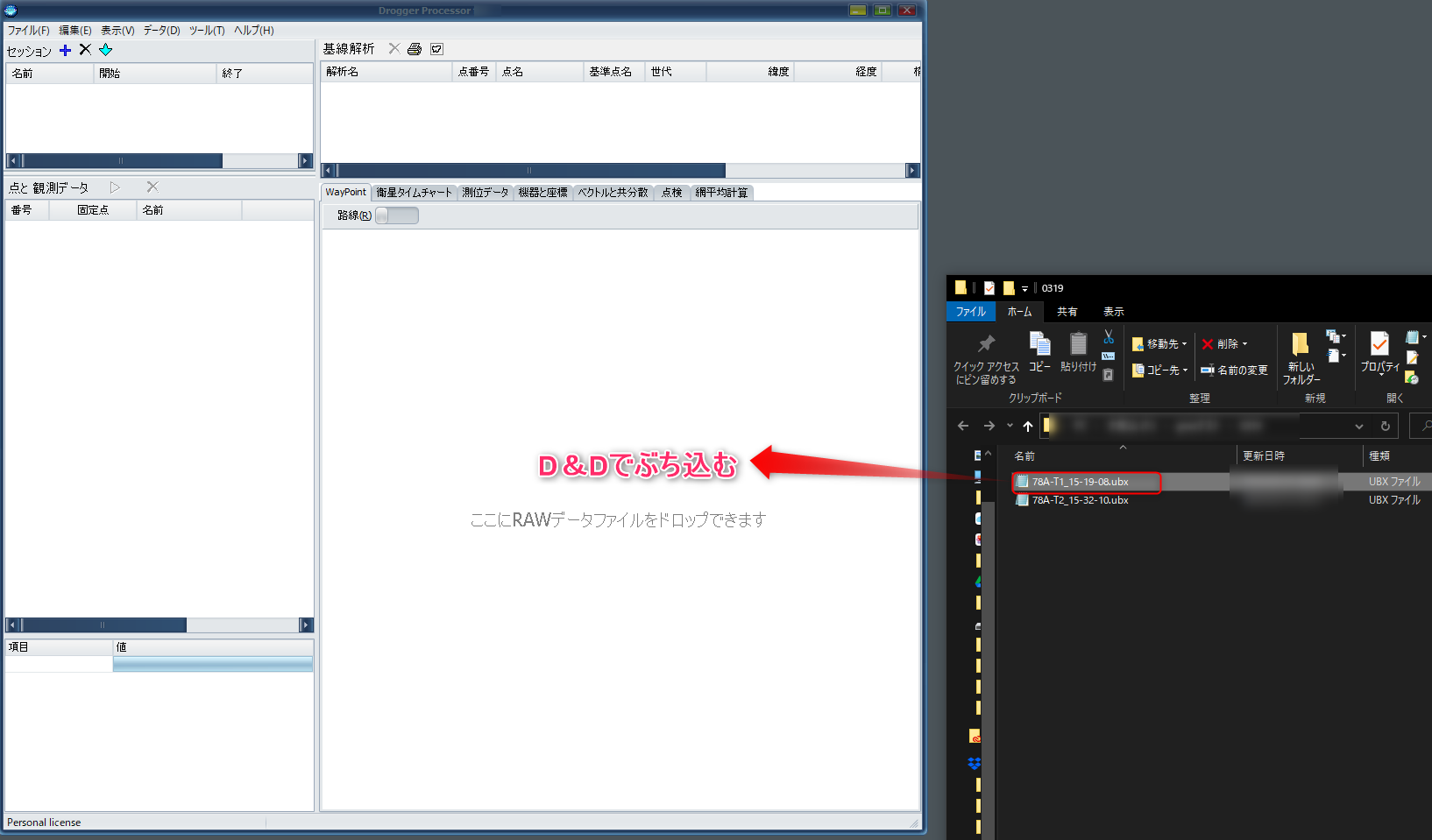
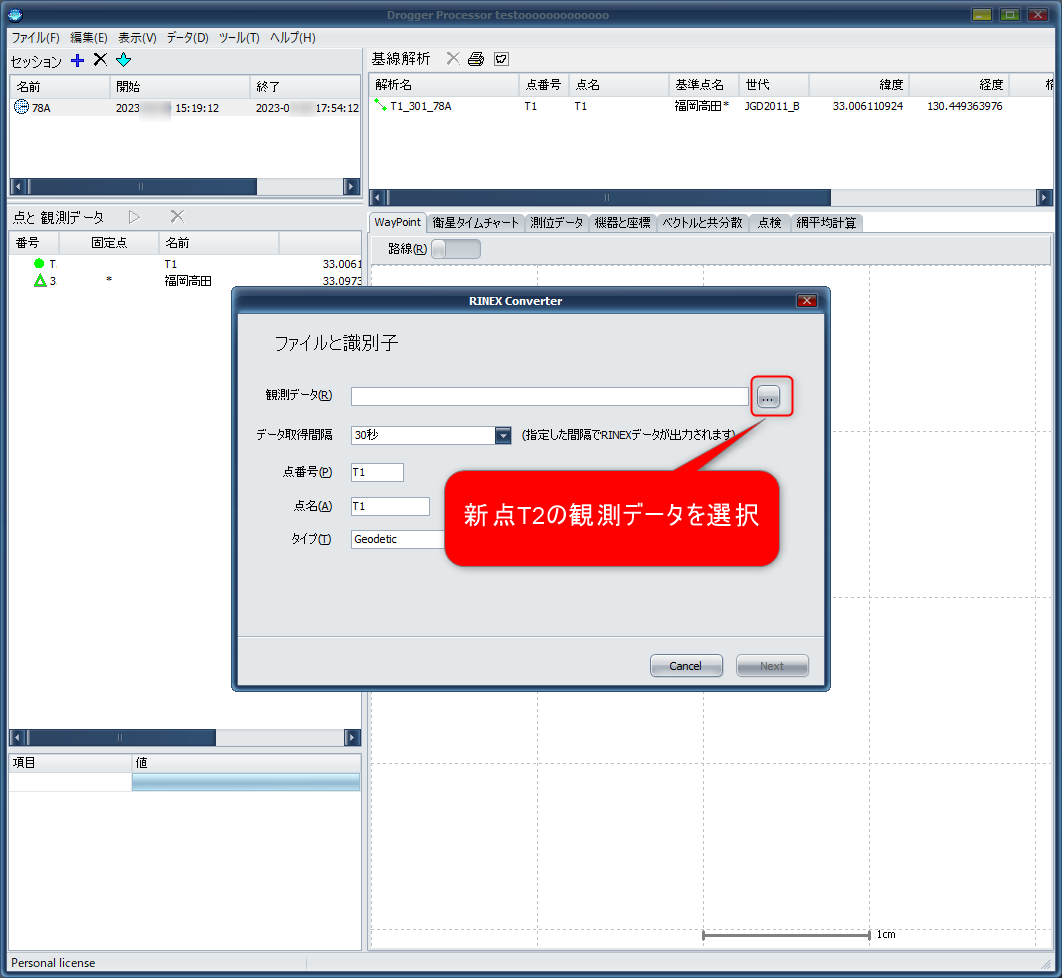
観測データをぶち込む
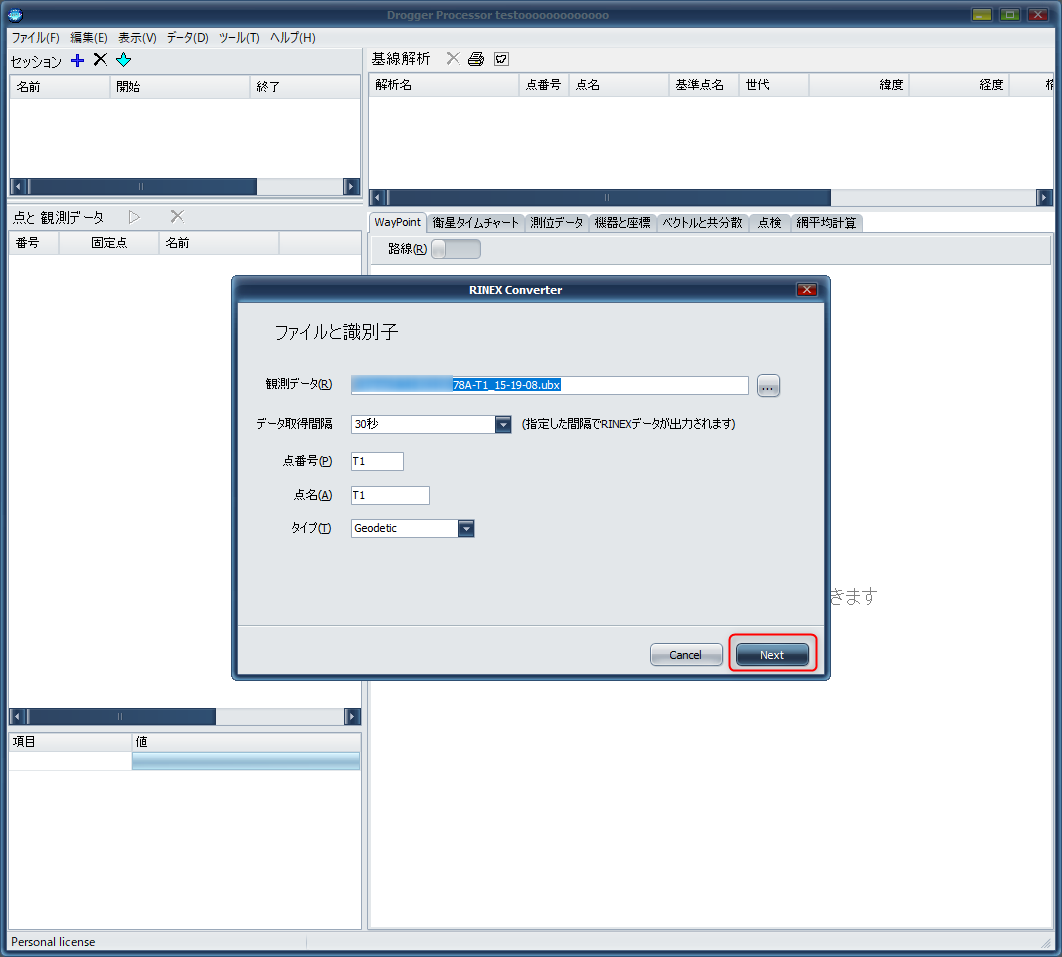
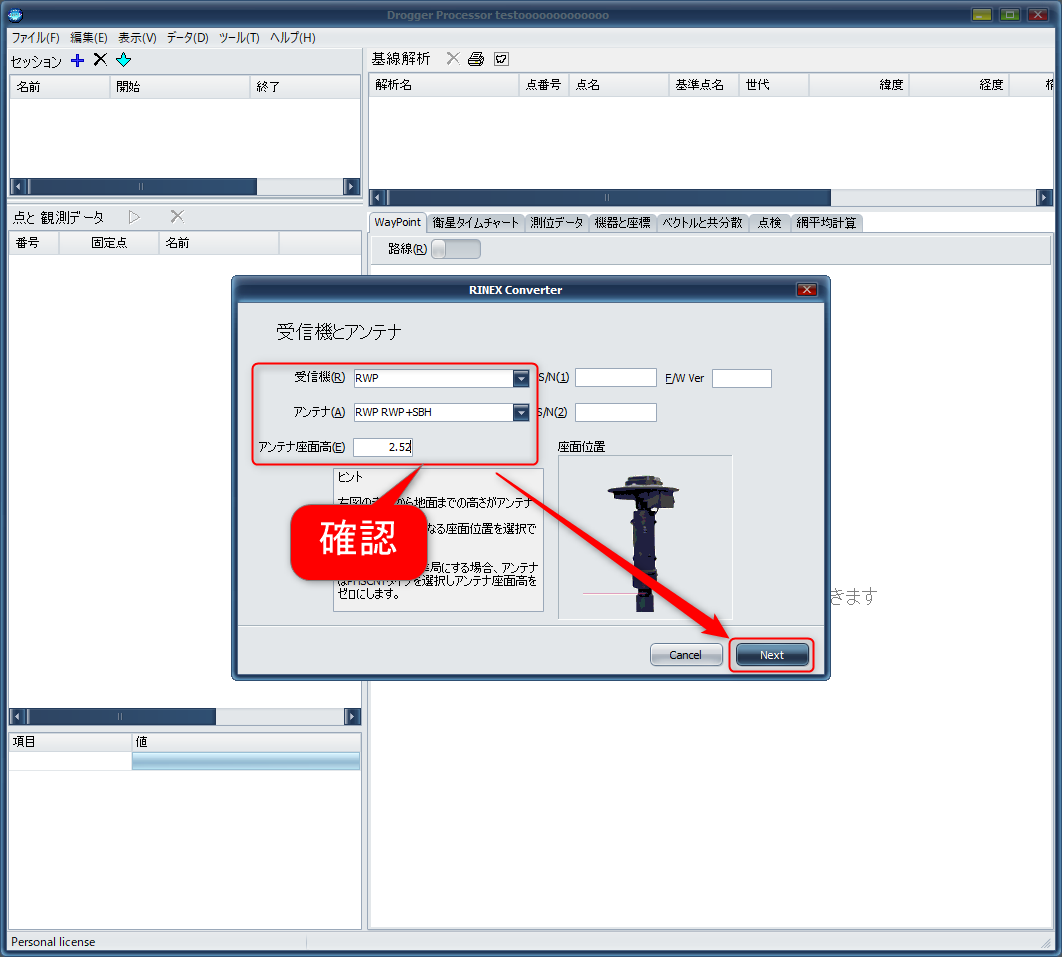
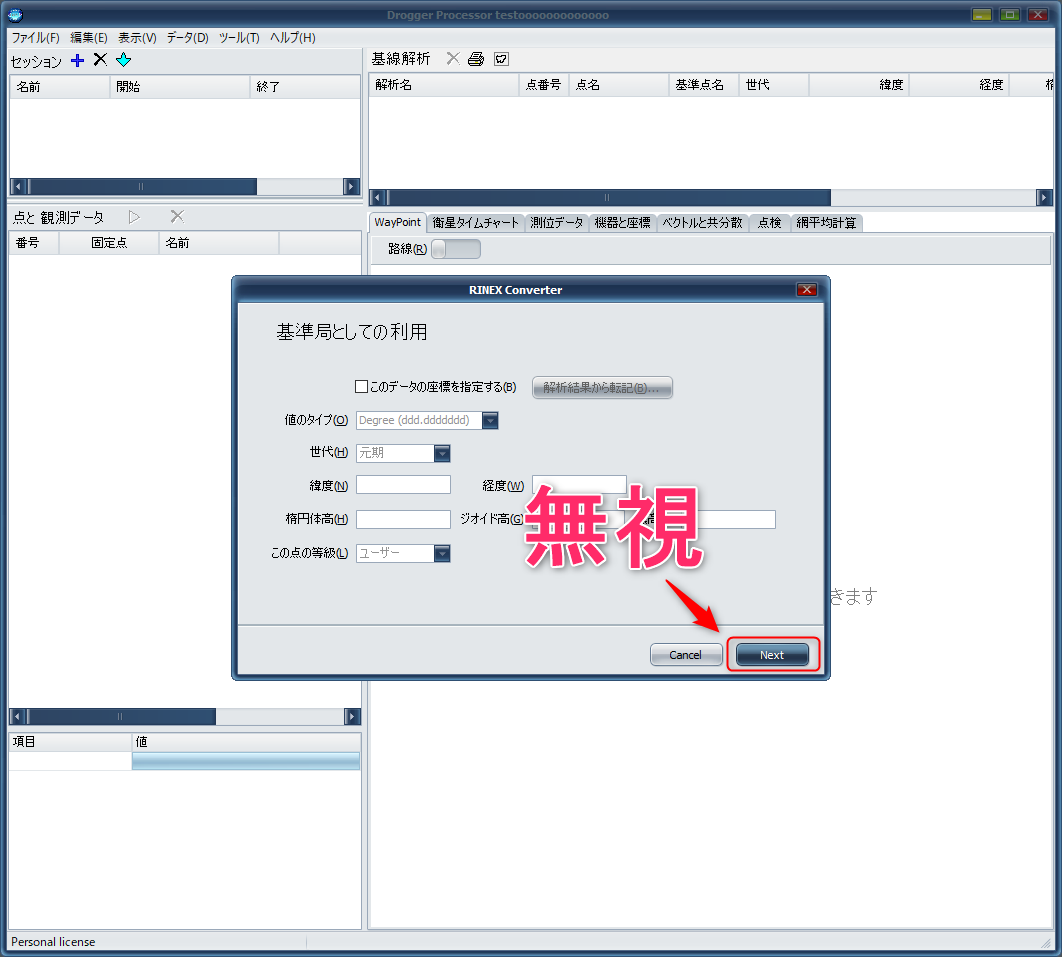
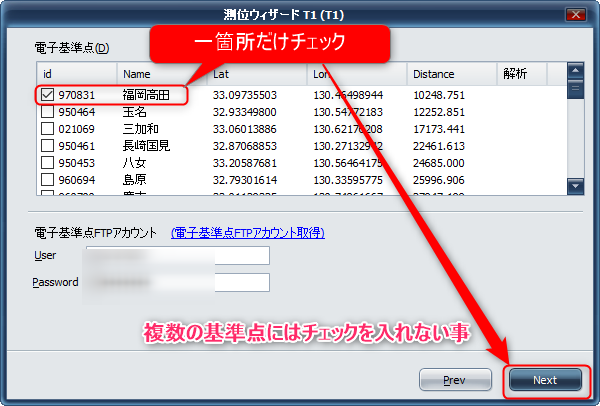
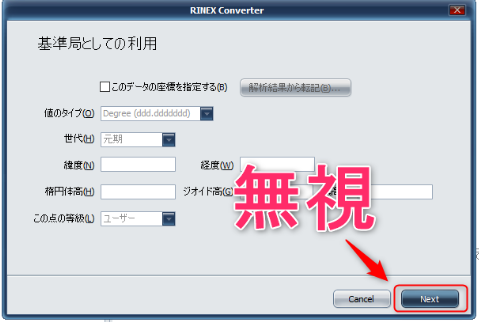
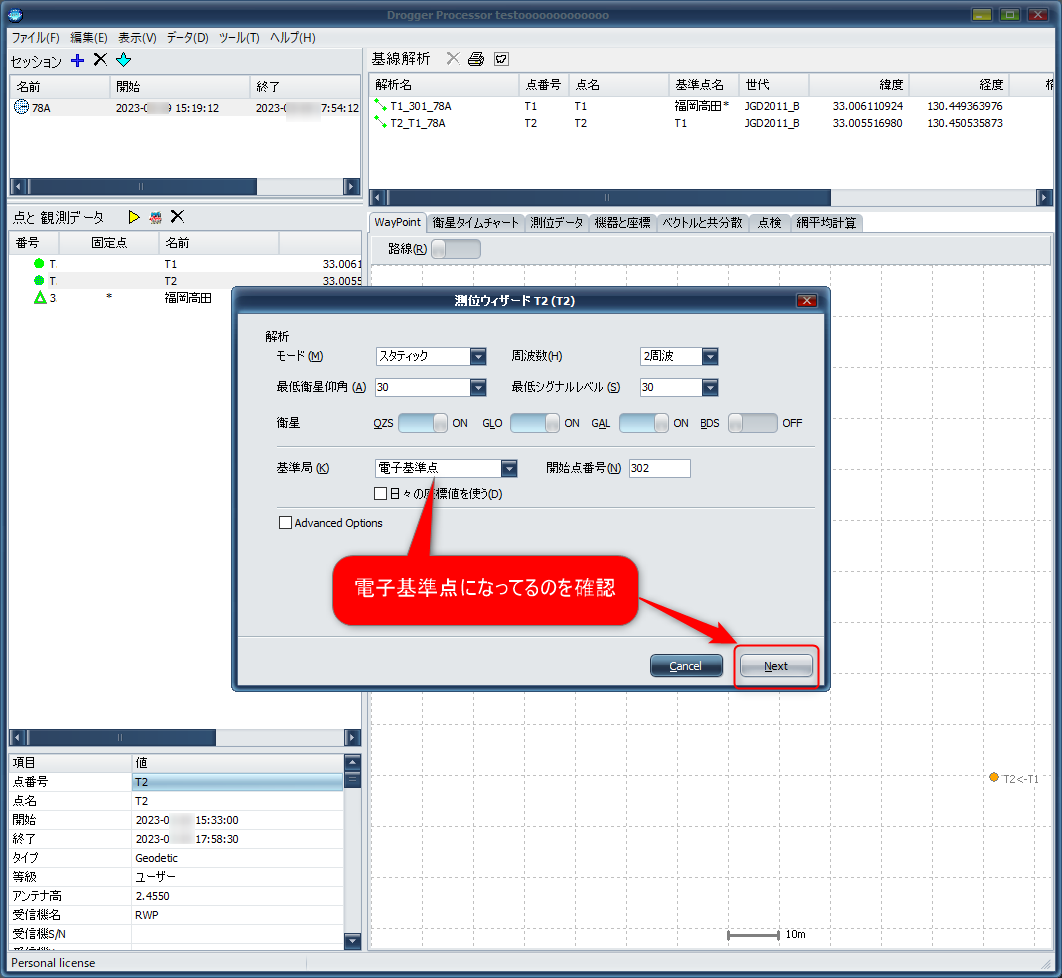
まずはT1と始点となる電子基準点を解析
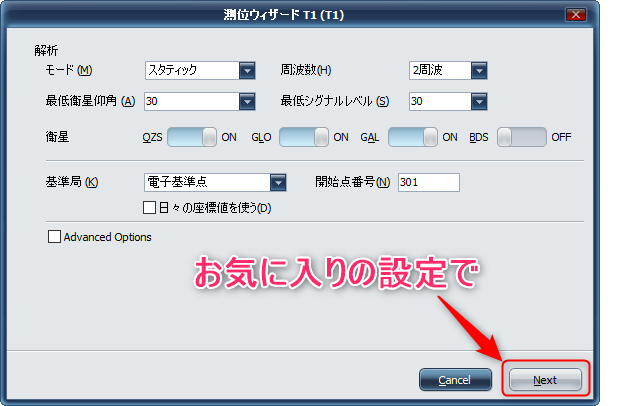
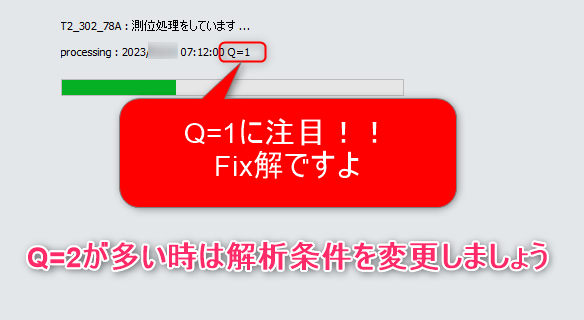
※Q=2が多い時はここで最低衛星仰角や最低シグナルレベルを調整して、Fix解が多い条件を設定しましょう。
以降の解析は、同条件で行います。GNSS測位の基本は同一条件で同一誤差の消去です。
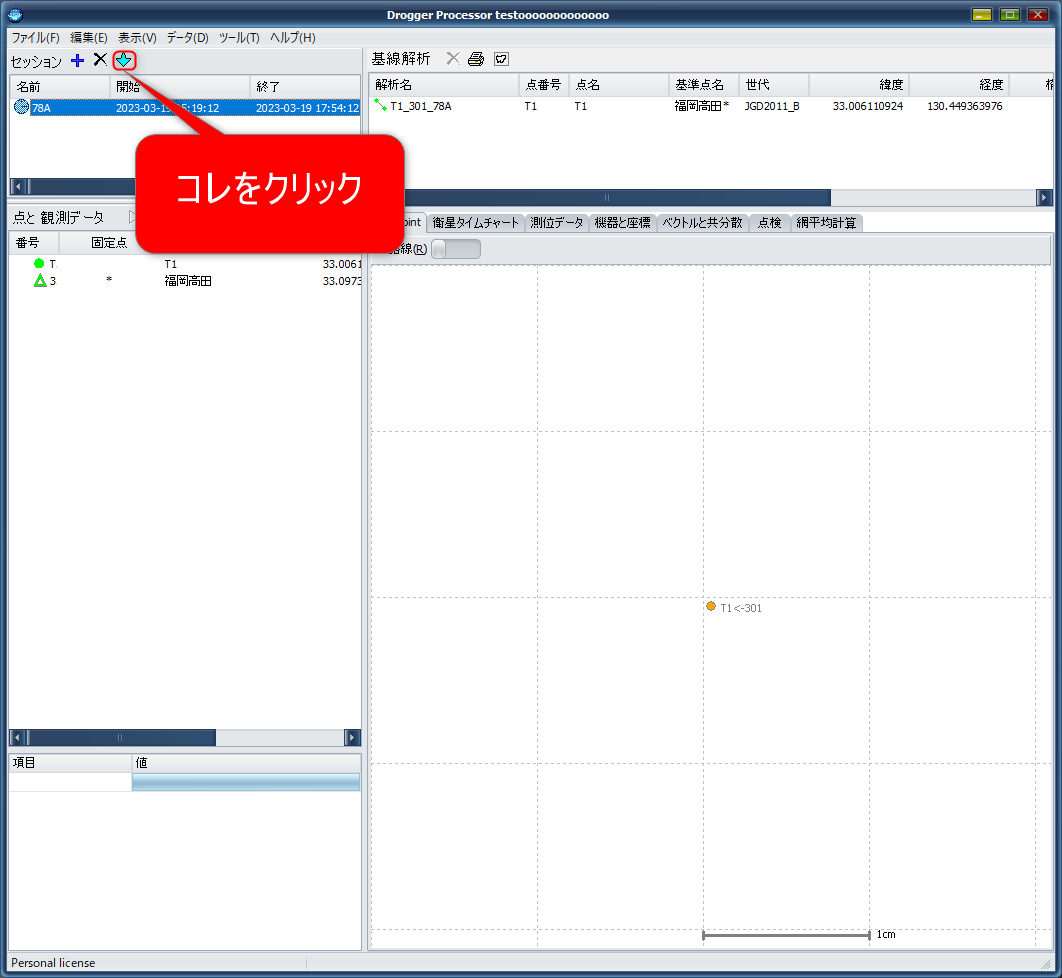
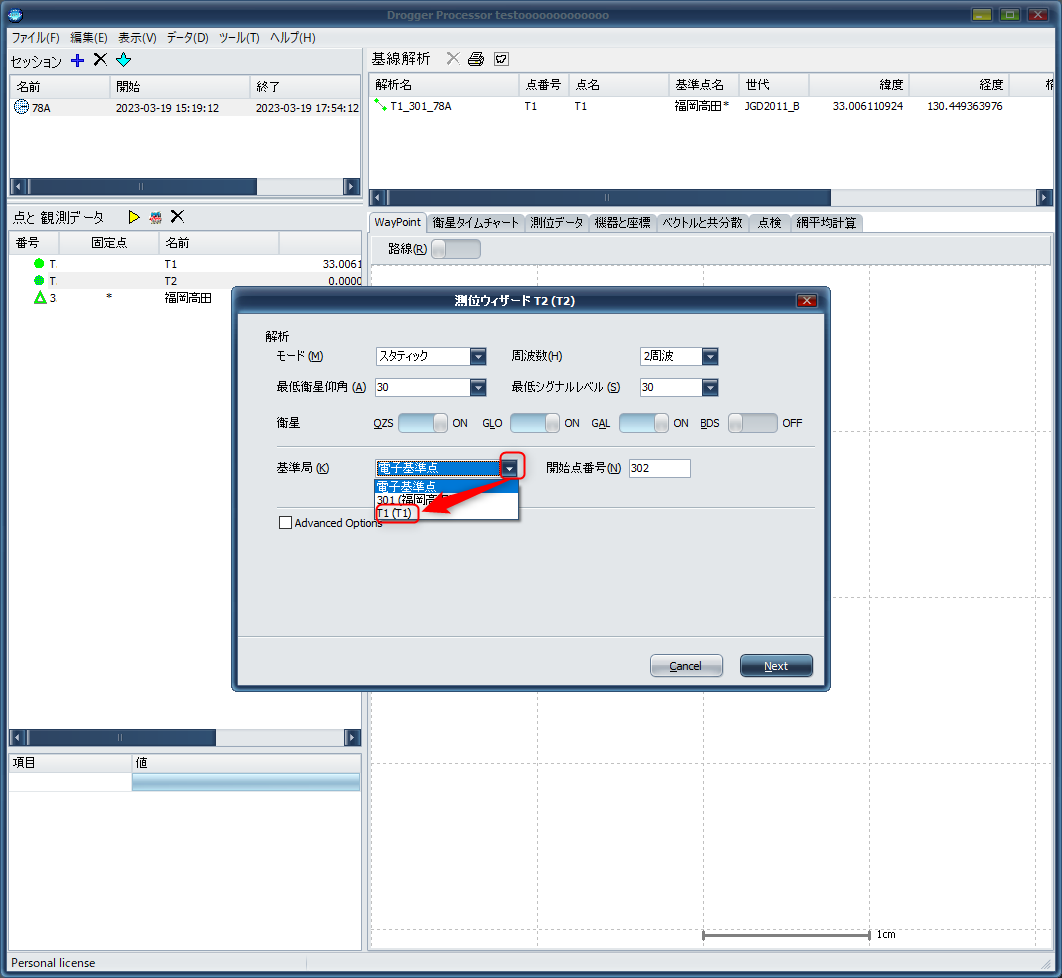
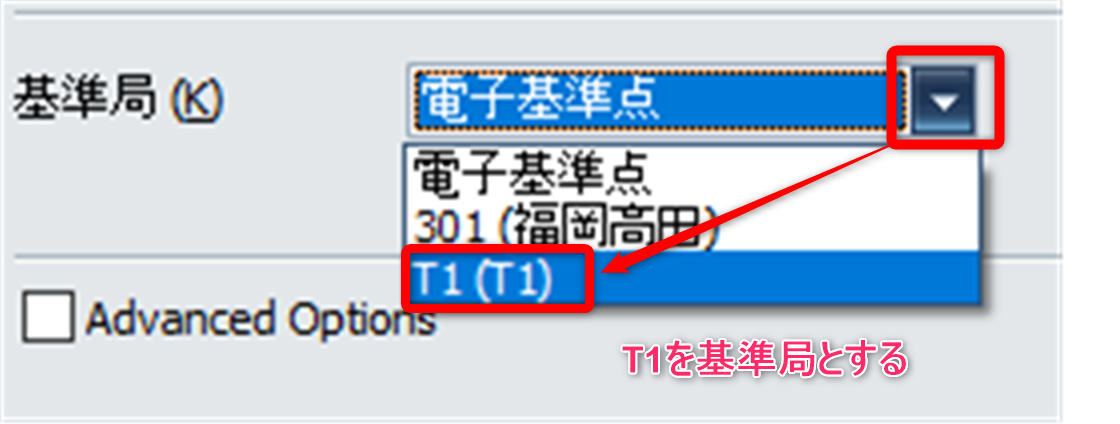
次にT2と、先ほど解析したT1を基準点にして解析




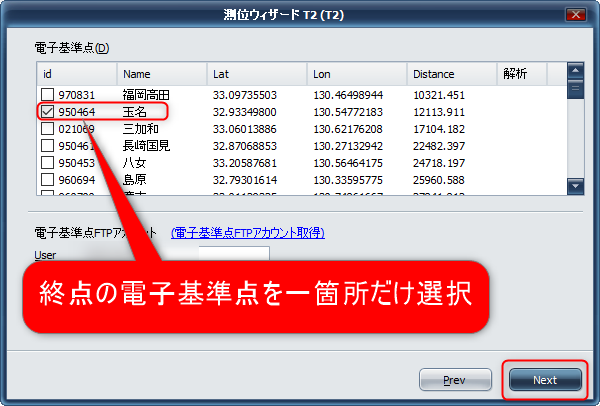
最後にT2と、終点にする電子基準点と解析する

完了
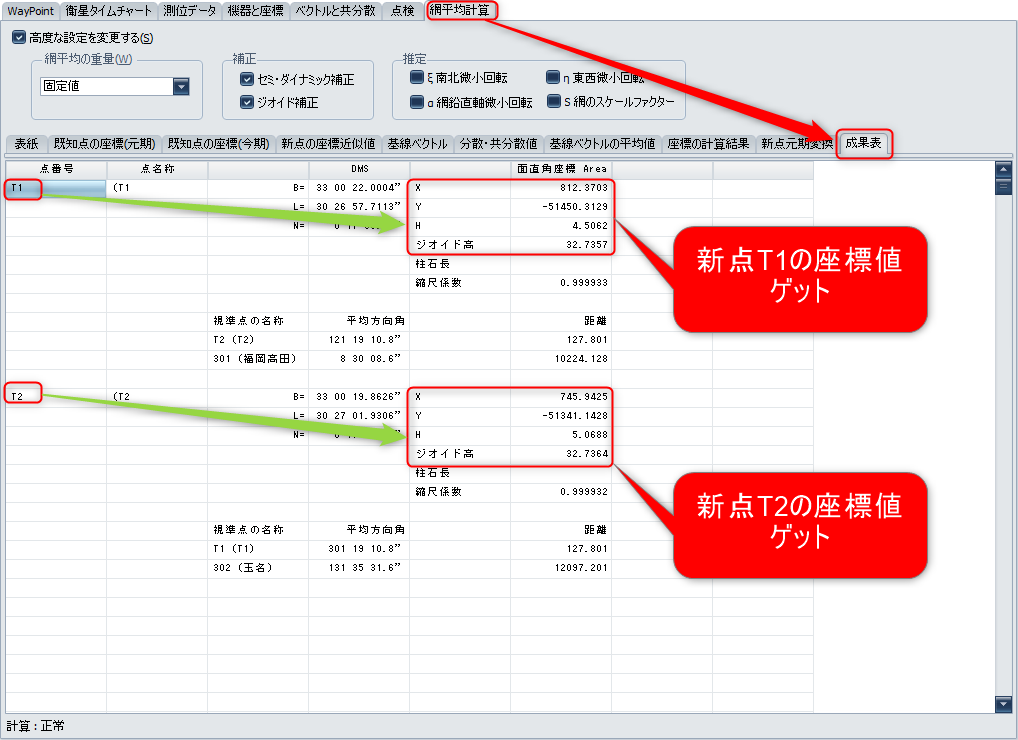
解析結果を確認する。










いつも大変参考にさせて頂いております。droggerの設定等情報がすくないなか、親切
丁寧なブログ記事いつも感服させられております。
今度はぜひdroggerでのネットワーク型RTK直接法の設定やり方をお願いします!!
VRSは契約してなくて・・・
いつもお世話になっております。
当方の知人の調査士がDroggerの購入を検討中なので、アドバイスを下さい。
当方はRWPは所有していますが、RWXやRWMは選択肢としていかがでしょうか。
ビズステーションに聞いてみたところ、Xのアンテナは高性能ではあるけれど、
精度的な面でPと大差はない、とのことでした。2台併用のパターンであれば
同一アンテナにしておいた方が誤差は少ないとのことでした。
最初に購入する一台としては、小型のRWMがいろいろな用途に使えてベターなのかと思います。
杭探しやTSの振り向かせに使うなど、絶対精度よりは取り回しが便利そうだからです。
絶対精度や2台運用を考えるならばPやXが良いのでしょうが、実際にそれらをお持ちの
桜町測量さんとしてのご意見を聞かせてもらえれば幸いです。
よろしくお願いします。
購入費用<将来の利益=投資であると考えるのなら、RWMもRWPもどちらも買えばいいのではないかと思います。
今後の作業効率改善の効果から得られる利益を考えれば、両方購入しても以前では考えられないくらい安いと私は考えます。
購入費用≠将来の利益なら、それは趣味ですので、RWPでいいんじゃないでしょうか。pierotさんのRWPと合わせて2台併用できますね。
そもそも三次元網平均計算プログラムが無料で使えるだけでも、メーカー製プログラムの数十万円分の費用を節約出来てます。
早速のお答えありがとうございます。
確かに価格的にはどれも格安ですものね。
ただ、初めて購入される方には悩みどころみたいです。
特に機種毎の性能差が気になるみようで。
当方もMとPの精度差は確認してみたいです。
RWPを1台導入しており、スタテック観測もなんとか試しては見ましたが、2第同時の観測も行いたいのですが、同機種のRWPがよろしいのでしょうか。また新点を設置する時の点間距離は50m以上でもよろしいのか?同時観測となるとスマホは1台でもいいのかよく分かりませんのでご教授願います。
当サイトは二次情報ですので、より詳しい情報を知りたい場合は公式サイトをご確認下さい。
https://drogger.hatenadiary.jp/
同時観測は同一機種でなくても大丈夫ですが、スマホで観測データを記録する場合はDrogger1台につき一つのスマホが必要になります。
なお、SDカード搭載モデルでSDカードにロギングする場合は、新たなスマホは必要ありません。